Hi, I'm Sahil Rajpurkar
Robotics Engineer | AI Enthusiast | Embedded Systems Developer
Building intelligent robotic systems that integrate software, hardware, and AI to solve real-world problems.

About Me
I'm a passionate robotics engineer with expertise in autonomous systems, computer vision, and embedded development. My work focuses on creating intelligent robotic solutions that bridge the gap between software and hardware.
I have extensive experience with ROS/ROS2, SLAM algorithms, and real-time perception systems. My technical skills span the entire robotics stack, from low-level embedded programming to AI-driven decision making.
Here are some technologies I've been working with recently:

Technical Skills
Robotics
ROS/ROS2, Isaac Sim, MoveIt, Nav2, RTAB-Map, Gazebo
Programming
Python, C++, Embedded C, Assembly, MATLAB, HTML, CSS, JavaScript, YAML, JSON, Bash
AI & Computer Vision
TensorFlow, PyTorch, OpenCV, SLAM, Object Detection, Reinforcement Learning, Weight & Bias
Embedded Systems
Arduino, Raspberry Pi, STM32, AVR (Atmel), FPGA, Sensor Integration
Navigation & Control
Path Planning, PID Control, Kalman Filters
Tools & Platforms
Git, Docker, Linux, AWS IoT, Jenkins
Professional Experience

Research Assistant – Robotics and Communication
Apr 2023 – PresentCommunication Networks Institute, TU Dortmund
Dortmund, Germany
Click to view details
- Autonomous Navigation: Working on LIO-SLAM with camera-based point cloud coloring
- 3D Object Detection: Use MMDetection for 3D object detection system with LiDAR, NVIDIA Isaac Sim, ROS2, and Python
- Robotic Air Hockey: Built dual-arm system using UFactory xArms controlled via tablet with ROS2 MoveIt
- Drone Interference Analysis: Analyze spectrum data of UAVs for interference using Aaronia Spectran V6
- Rescue Robotics Demo: Integrate mmWave sensors on Boston Dynamics Spot and Scout robots at DRZ
Research Assistant – Embedded and Testing
Jul 2020 – Sep 2022Biomedical Engineering and Technology Innovation Centre (BETiC), IIT Bombay
Mumbai, India
Click to view details
- Medical Devices: Led development of ventilators and oxygen generators, ensuring performance and ISO compliance
- Sensor Integration: Worked with UART, SPI, and I2C protocols and programmed STM32/ATMEL microcontrollers
- Real-time Algorithms: Developed diagnosis algorithms in Embedded C using RTOS with Git version control
- Testing: Conducted software- and device-level testing of medical devices in accordance with ISO 13485 standards
Featured Projects
Robotic Arm Pick-and-Place Chatbot
A simulation project where a 6-axis robotic arm performs pick-and-place tasks through natural language chatbot commands. Built with NVIDIA Isaac Sim, ROS2, and MoveIt for motion planning, the system uses YOLOv8 OBB for object detection and an LLM (Phi-3 via Ollama) to translate human instructions into robot actions in real time.
- Isaac Sim
- ROS2
- MoveIt
- FastAPI
- YOLOv8 OBB
- NLP
- Ollama (Phi3)
- Python
LineFollowing PID - Isaac Sim
A virtual robotics racing simulation inspired by the Robocon competition, built with NVIDIA Isaac Sim and ROS2. Two Robotnik Summit robots race by following a white line path while avoiding obstacles: both robots use PID control, but each with different fine-tuned parameters for performance comparison. The project provides ready-to-use ROS2 topics and sensors, so you can run your own control code on the robots and experiment with different strategies.
- Isaac Sim
- ROS2
- PID
- Computer Vision
- Robotnik Summit robots
- Python
- Simulation
UR5-Object-Alignment-Imitation-Learning
Developed an advanced imitation learning pipeline for precise bar alignment using the UR5 robotic arm in NVIDIA Isaac Sim and ROS2. The workflow features efficient data collection via manual joystick control, structured episode formatting for LeRobot, robust training with diffusion policy algorithms, and comprehensive model evaluation in photorealistic simulation environments.
- Isaac Sim
- ROS2
- LeRobot
- Real-time Control
- Imitation Learning
- Diffusion Policy
- Python
LiDAR-based 3D Object Detection System (Ongoing)
Developed a real-time LiDAR-based 3D object detection system for a mobile robot using NVIDIA Isaac Sim, ROS2, and Python by fusing LiDAR and RGB data for colorized 3D SLAM, processing with MMDetection and TensorFlow to achieve accurate perception in dynamic environments.
- Isaac Sim
- ROS2
- LiDAR
- TensorFlow
- Point Cloud Processing
- MMDetection
- 3D SLAM
Air Hockey System using xArm Robotic Arm
Designed a robotic air hockey system using uFactory xArm 6-axis robotic arms. Simulated a human vs machine game where one arm was user-controlled and the other trained using machine learning for autonomous gameplay. Enabled real-time interaction, trajectory tracking, and strategy learning to mimic competitive behavior.
- xArm 6
- Robotics Simulation
- Machine Learning
- Python
- Real-time Control
Prototypical Chatbot for SI/PI/EMC | TU Dortmund
Created an AI-based chatbot using RASA NLU to assist PCB designers with Signal Integrity (SI), Power Integrity (PI), and Electromagnetic Compatibility (EMC) issues, providing real-time guidance and optimization within EDA workflows. Integrated simulation software into the chatbot, enabling on-platform electrical design simulations.
- RASA NLU
- AI/ML
- EDA Tools
- Python
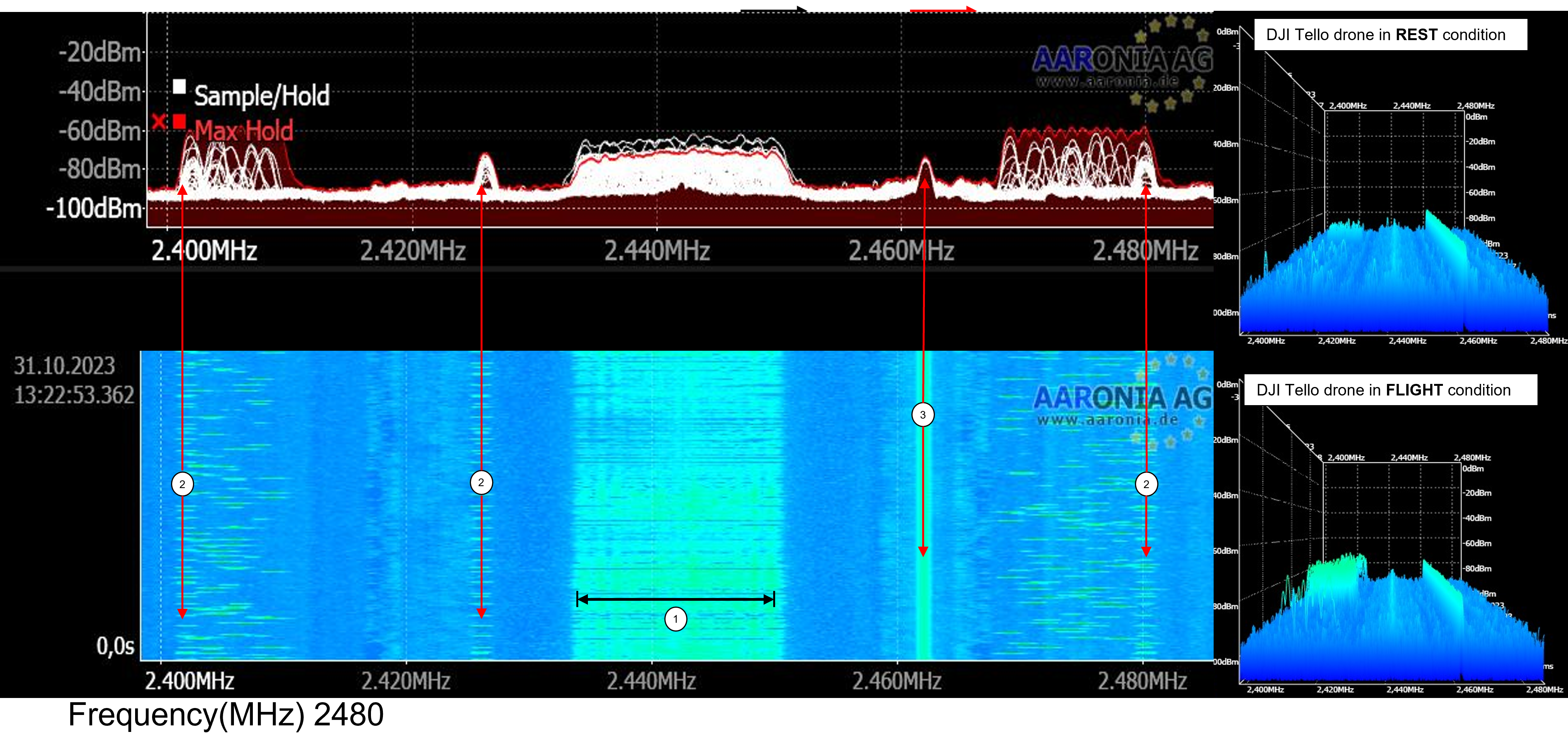
Drone Signal Interference Detection Using ML (Ongoing)
Conducted drone interference analysis with spectrum data collection on multiple UAVs using Aaronia Spectran V6. Developed an AI-based classification pipeline to detect and identify wireless interference in drone communication systems, training models to classify interference from Bluetooth, FHSS, and OFDM signals.
- Aaronia Spectran V6
- Spectrum Analysis
- Signal Classification
- Python (Scikit-learn, NumPy)
- Bluetooth / FHSS / OFDM
- Machine Learning

Rescue Robotics Demonstration
Integrated mm-Wave health monitoring sensors onto a Boston Dynamics quadruped robot in a Linux-based environment, enabling real-time physiological data acquisition over 5G. Conducted rescue operation simulations at the Deutsches Rettungsrobotik Zentrum (DRZ) to evaluate system performance in search-and-rescue scenarios.
- Boston Dynamics
- mm-Wave Sensors
- Linux
- 5G Communication
- Sensor Integration
- ROS2
Palletizer Cell Control Security System
Built a complete simulation of a ROS 2-driven robotic palletizing cell integrated with a REST API and real-time, interactive web-based HMI. The system processes palletizing requests from a warehouse management system (WMS), monitors critical safety parameters, and allows seamless human interaction through a live dashboard.
- ROS 2 Humble
- REST API (Python FastAPI)
- WMS
- WebSocket + JavaScript HMI
- Real-Time Simulation

Medical Device Development and Testing
Conducted end-to-end research and development of medical devices, implementing core device functionalities in embedded C. Integrated medical-grade sensors into the system, ensuring accuracy and reliability. Led comprehensive software and hardware testing using Jenkins-based CI/CD pipelines and managed code versions with Git to maintain high-quality standards throughout development.
- ISO13485
- Embedded C
- CI/CD
- HIL
- Git
- Software Testing
- Jenkins
- Medical Device
ESP32-S3 Fire Redundant System using IR Thermal Imaging
Built a fire detection and response system using ESP32-S3, MLX90640 IR thermal camera, and a relay-controlled actuator. The system detects abnormal heat zones and automatically triggers a fire extinguisher while sending real-time WiFi alerts to a server. Features a configurable temperature threshold and modular Arduino codebase.
- ESP32-S3
- MLX90640 Thermal Camera
- Relay Control
- Arduino
- WiFi & HTTP
- Embedded Systems
Line-Following with Obstacle Avoidance: Fire Bird Robot
Designed and implemented a line-following robot using the Fire Bird V platform (ATmega2560) developed under IIT Bombay’s MHRD e-Yantra initiative. The robot follows a line and avoids obstacles in real time using IR and proximity sensors, and is fully programmed at the register level via Atmel Studio.
- ATmega2560 & ATmega8
- IR Proximity Sensors
- Line Sensors
- Motor Control (PWM)
- Register-Level Programming
- Atmel Studio
- e-Yantra IIT Bombay
Robot Drive Systems: Multi-Drive Robot Control with AVR
Designed and implemented drive control systems for differential, 3-wheel omni, and 4-wheel omni robots using AVR ATmega2560 microcontroller and Bluetooth-based PS2-style controller input. Features include PWM motor control, drive-specific kinematics, and wireless joystick integration for advanced robotic motion.
- AVR ATmega2560
- 2W / 3W / 4W Omni Drive
- PWM Motor Control
- Kinematic Mapping
- Bluetooth (HC-05/06)
- PS2 Joystick Controller
- Atmel Studio
- UART Communication
Line-Following Three Wheel Omni Drive
Designed and developed a three‑wheel omni‑directional robot for the Robocon competition. The robot autonomously follows a white line using an OPT101 sensor array. A custom line-following algorithm was implemented on an AVR ATmega2560 microcontroller. The system leverages PWM motor control and kinematic mapping to achieve smooth and responsive navigation.
- Line-Following
- AVR ATmega2560
- 3W Omni Drive
- PWM Motor Control
- Kinematic Mapping
- Bluetooth (HC-05/06)
- PS2 Joystick Controller
- Atmel Studio
- UART Communication
Swerve Drive System
A custom swerve drive implementation using ATmega2560 and AVR C. It controls four drive motors and two power window motors via a belt-gear mechanism for real-time wheel orientation. The system uses encoder feedback for precise control and is operated wirelessly with a PS2 Bluetooth joystick.
- AVR ATmega2560
- Swerve Drive
- PWM Motor Control
- Kinematic Mapping
- Bluetooth (HC-05/06)
- PS2 Joystick Controller
- Atmel Studio
- UART Communication

Prototype Color Sorter Machine
This project presents a working prototype for automatically sorting objects based on their color. The system uses an OPT101 photodiode sensor for color detection and is controlled by an STM32F103 microcontroller. Color is determined via ADC values, and two servo motors handle object positioning and sorting into designated bins.
- STM32F103x
- OPT101 Color Sensor
- ADC Signal Processing
- Servo Motor Control
- Embedded C
- Hardware Prototyping

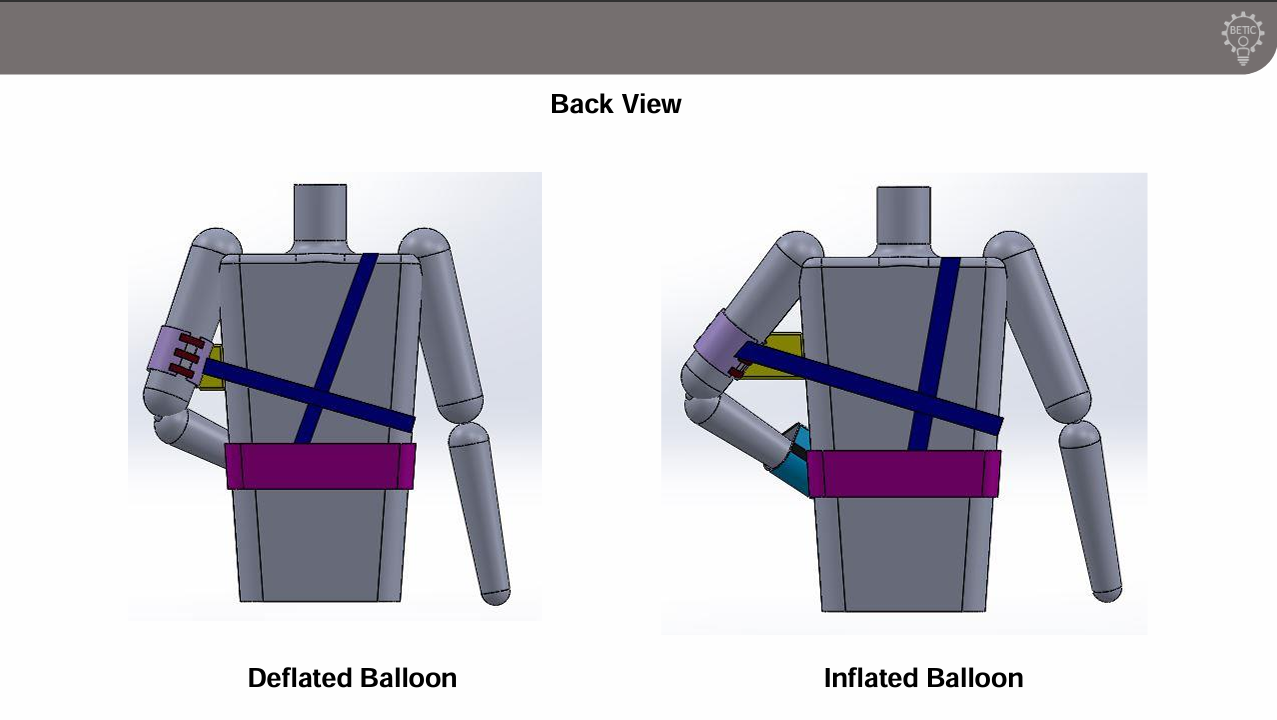
IR Health Monitor: Wearable Vital Monitoring System
Developed a wearable health monitoring system integrated into a shoulder brace for post-surgery recovery. Powered by an ESP32, the device reads SpO2, breath rate, and skin temperature using the SparkFun MAX30102 and MLX90640 sensors, and transmits the data wirelessly to a remote server via HTTP.
- ESP32
- MAX30102 (SpO2 & Respiration)
- MLX90640 Thermal Sensor
- Arduino
- HTTP & JSON
- IoT Health Monitoring
Education
Master's in Automation and Robotics
Oct 2022 – Feb 2025Technical University Dortmund
Dortmund, Germany
Click to view details
- Specialization: Robotics and Cognitive Systems
- CGPA: 2.3/4.0
- Thesis: "Development of Machine Learning-based Radar Object Detection for Logistics Entities"
- Key Courses: Mobile Robots, Machine Learning, Robotic Manipulators, Computer Vision

Bachelor's in Electronics and Telecommunication
Aug 2016– Jul 2020Mumbai University – K.J. Somaiya College of Engineering
Mumbai, India
Click to view details
- Major: Embedded Systems
- CGPA: 2.0/4.0
- Thesis: "Controlled Motion of a Pneumatic Quadruped Robot"
- Key Courses: Control Systems, Embedded Systems, Digital Signal Processing
Thesis
Towards 6G-Driven Sensing: Radar-Based Object
Detection for Logistics Entities
Technical University Dortmund
Oct 2023 – Jun 2024
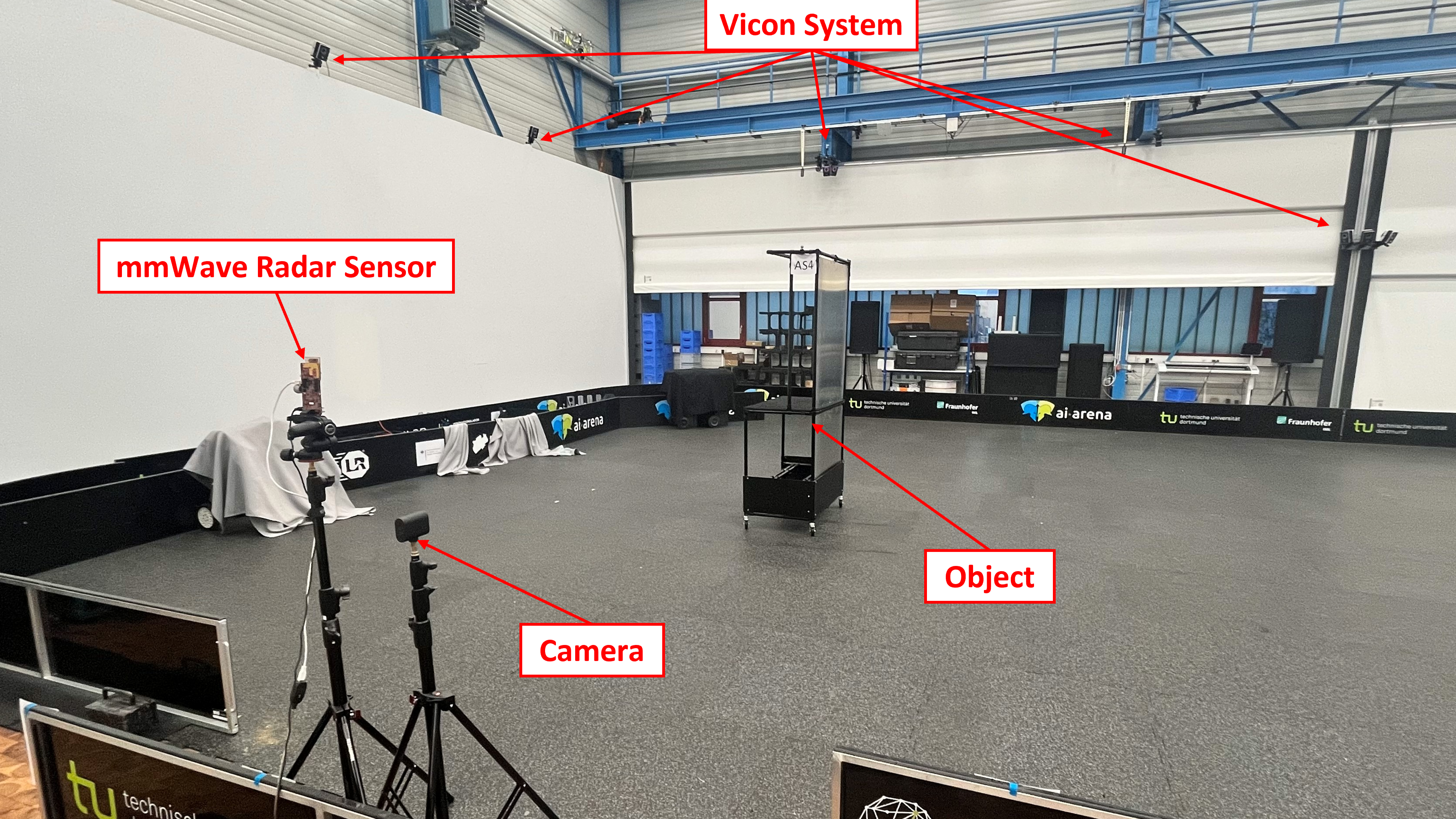
- Developed ML-based detection pipeline using TI’s IWR6843ISK mmWave radar for logistics automation.
- Trained YOLOv7, Detectron2, and OpenPCDet models on radar-derived 2D/3D data for entity detection (e.g., forklifts, robots).
- Enabled real-time operation in cluttered indoor environments, demonstrating radar’s resilience and privacy-preserving capabilities over LiDAR and cameras.
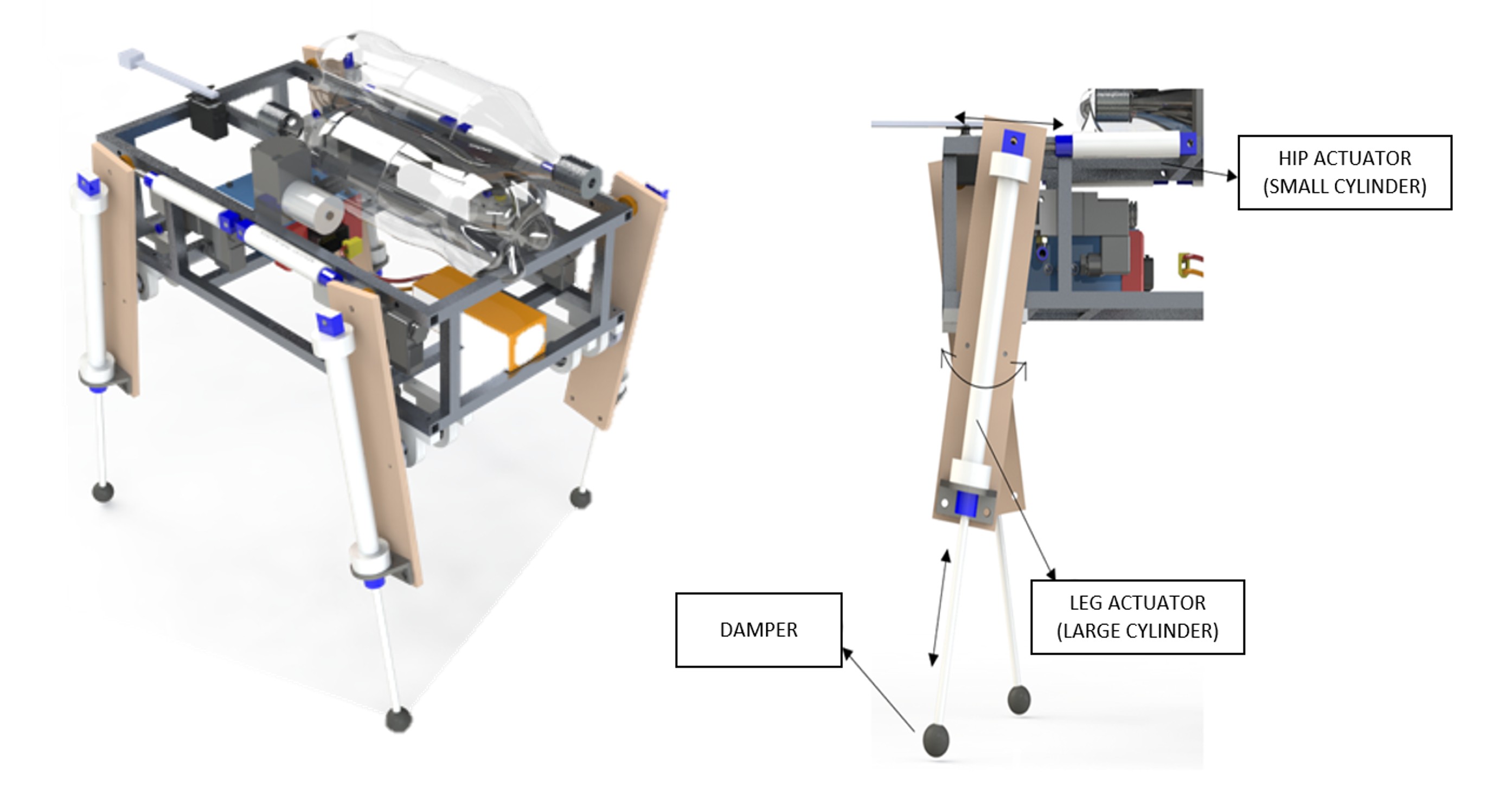
Controlled Motion of a Pneumatic
Quadruped Robot
K J Somaiya College of Engineering
Sep 2019 – Apr 2020
- Collaborated with Mercury Pneumatic Pvt. Ltd. to design a pneumatic quadruped robot with two active degrees of freedom.
- Developed and tested C++ control algorithms for walking and pronking gaits to evaluate robot dynamics and controllability.
- Customized the PCB to optimize space and ensure seamless integration within the robot’s structure.
Publications
Gaits Stability Analysis for a Pneumatic Quadruped Robot Using Reinforcement Learning
International Journal of Industrial and Manufacturing Engineering, Vol. 15, No. 9, WASET, 2021
This paper presents a stability analysis of various gaits for a pneumatic quadruped robot, leveraging reinforcement learning techniques to enhance locomotion performance and adaptivity.
Internships

Robotics Intern
Jun 2020 - Jul 2020Robotbanao
Mumbai, India
Click to view details
- Arduino-based automation projects with Bluetooth and voice control
- Simulated circuits in Proteus for robotic arm and home automation
- Implemented servo, relay, and ultrasonic sensor logic
- Created documentation with pin diagrams and simulation outputs

Embedded Systems Intern
Jan 2020 - May 2020Enigma Machines Private Limited
Mumbai, India
Click to view details
- Automated an EPE foam lamination machine using custom Delta DVP12SE PLC ladder logic programmed in WPLSoft
- Developed an HMI GUI with Delta DOP-107EV HM using DOPSoft for real-time machine monitoring and control
- Integrated a NEMA17 stepper motor for precise machine operation, enhancing overall efficiency
- Delivered a custom automation solution addressing gaps in local industrial automation options
Embedded Systems Intern
Jul 2019 - Dec 2019Kidyfit Care Private Limited
Mumbai, India
Click to view details
- Contributed to a smart health monitoring device for newborns to detect sleep apnea
- Designed a two-layer custom PCB in KiCad, handled component selection, and developed the working prototype
- Programmed ESP32 for IoT functionality, integrated sensors, and performed circuit debugging
- Delivered a successful first-pass PCB embedded in the working prototype
e-Yantra Summer Intern
Jun 2018 - Jul 2018e-Yantra Lab, IIT Bombay
Mumbai, India
Click to view details
- Developed a line-following robot with object (color) detection using Fire Bird V ATMEGA2560
- Programmed in Embedded C using Atmel Studio with register-level control (PWM, ADC)
- Interfaced IR sensors, white line sensors, and motor drivers
Competitions

NVIDIA Isaac Sim Hackathon
LycheeAI • Sep 2025
- Developed SPARC – Smart Pick n Place with AI Robotics and Chatbot
- Built a pipeline combining Ollama Phi-3 (LLM), YOLOv8-OBB, and MoveIt2 + UR5 Arm in Isaac Sim
- Enabled natural language commands like “Grab the banana and place it in box two” for real-time robot actions
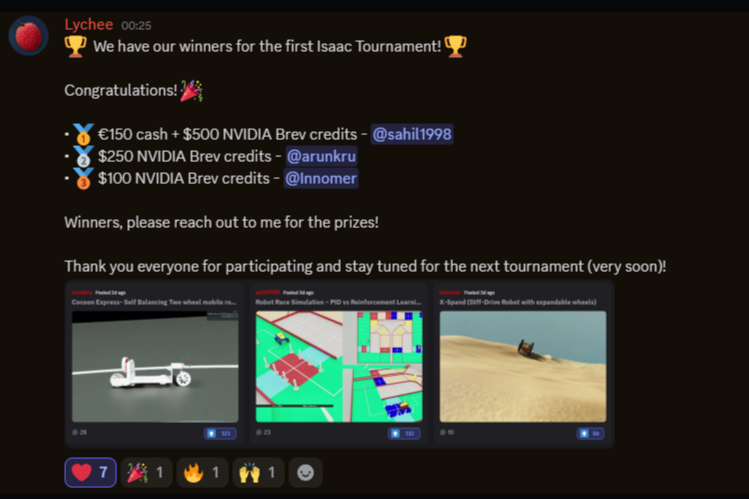
LycheeAI Isaac Tournament
LycheeAI • Aug 2025
- Designed and simulated a mobile robot in Isaac Sim with articulated wheels and autonomous navigation
- Secured 1st rank in an international robotics challenge
- Won €150 cash + $500 Brev Cloud Credits sponsored by NVIDIA

RoboCon 2019
IIT Delhi • Aug 2019
- Led a 30-member interdisciplinary team (mechanical, software, hardware) for RoboCon and MATLAB competitions
- Developed and programmed 3-wheel and 4-wheel autonomous robots using laser mapping
- Implemented line-following and custom SLAM algorithms, improving navigation speed by 40%
- Competed against 100+ university teams at a national level


Shell Eco-marathon 2019
Shell Technology Centre, Bangalore • Nov 2019
- Refined a bicycle-based engine to achieve an exceptional fuel efficiency of 268.7 km/l
- Designed and integrated a thermal camera-based fire-redundant safety system with IoT support
- Delivered a technical presentation to a panel of industry experts
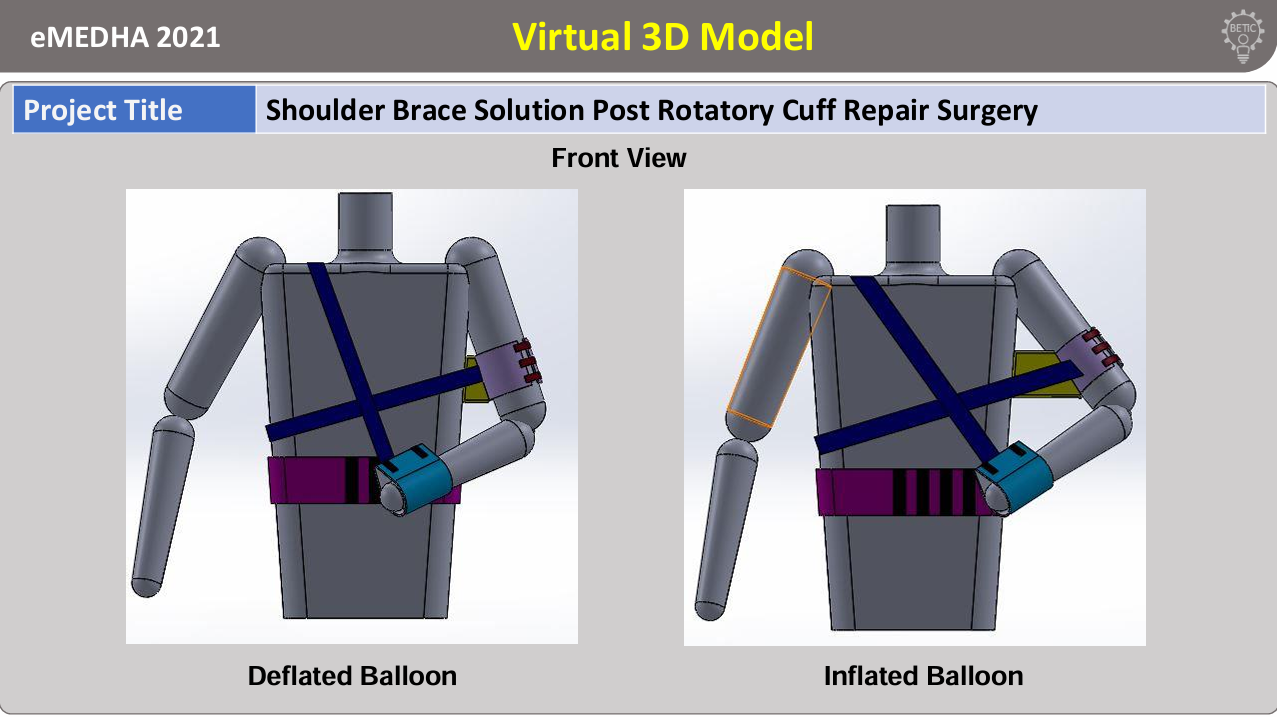
eMEDHA 2021
IIT Bombay, Mumbai • May 2021
- Built a cost-effective, adjustable shoulder brace for post-surgery recovery
- Defined problem through clinical meetings with doctors
- Integrated IR sensor to monitor SpO2, skin temperature, and breath rate
- Implemented real-time health alerts for patient safety
Awards & Honors
1st Place Winner
LycheeAI Isaac Tournament
OnlinePUSH-Scholarship
KJ Somaiya College of Engineering
Mumbai, India5th Place
Robocon 2019
IIT Delhi, India1st Place
Shell Eco-Marathon 2019
Bangalore, IndiaBest Creativity Award
eMEDHA
IIT Bombay, Mumbai, IndiaVolunteering
Technical Volunteer
ROBOCUP 2024
Eindhoven, Netherlands
- Assisted participants in using the vSTING module to simulate network degradation effects
- Helped configure latency and packet loss settings
- Supported troubleshooting during simulations
Students Volunteer
DEGIS-German Association for International Students
Bochum, Germany
- Organized events for international students, ensuring an inclusive and memorable experience
- Documented events through videos and photos
- Managed social media posts and engagement
Mentor
Medical Device Innovation Camp (eMEDIC)
Mumbai, India
- Helped participants define clear problem statements for the medical hackathon
- Provided feedback and analysis on pitch presentations (PPTs)
- Assisted with hardware component planning and sourcing
Coding Instructor
Workshop - Introduction to Arduino
Mumbai, India
- Teach robotics fundamentals to underprivileged students
- Develop curriculum for beginner Arduino workshops
- Mentor teams for internal robotics competitions
Get In Touch
Contact Information
sahilrajpurkar1998@gmail.com
+49 176 71678983
Dortmund, Germany